
In order to further standardize the management of laparoscopic surgery systems, the CMDE organized the revision of the “Key Points for Technical Review of Laparoscopic Surgery Systems” (2023 revision), which is hereby released:
Key Points of Technical Review of Laparoscopic Surgical System(2023 revision)
This review point is intended to guide registration applicants in the preparation and writing of laparoscopic surgical system product registration application materials, and also to provide reference for the technical review department to review registration application materials.
The main points of this review are the general requirements for laparoscopic surgery system products. Registration applicants should determine whether the content is applicable based on the specific characteristics of the product.
Enrich and refine the content of the registration application materials.
1.Product Range
This review point is applicable to porous laparoscopic surgery system (referred to as surgery system). According to the current “Medical Device Classification Catalog”, the classification code of this type of product is 01-07-03, and the management category is Class III.
2.Product Introduction
The product composition of laparoscopic surgery system usually includes doctor console, patient operation platform, image processing platform, three-dimensional laparoscopic endoscope (referred to as endoscope), surgical instruments, etc.
(1)Doctor Console
The surgeon is located at the surgeon’s console and controls all movements of the surgical instruments and endoscope (if present) by using the hand controls (master controller) and a set of foot pedals (if present). The endoscope is used to acquire stereoscopic images of the surgical field, and the surgeon observes the view of the patient’s anatomy and surgical instruments and other user interface features on the 3D viewer (Figure 1) or wearing 3D glasses on the display screen (Figure 2). The illustrations in this article are just examples, and the actual structural designs of different manufacturers are different.
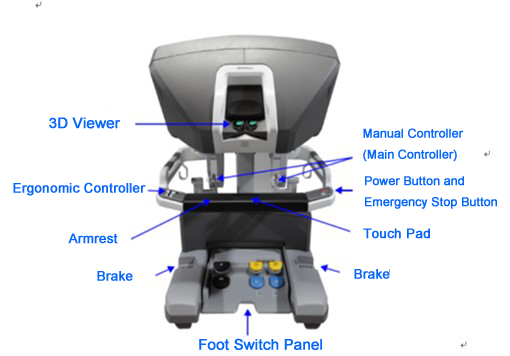
Figure 1 Doctor console (3D viewer)
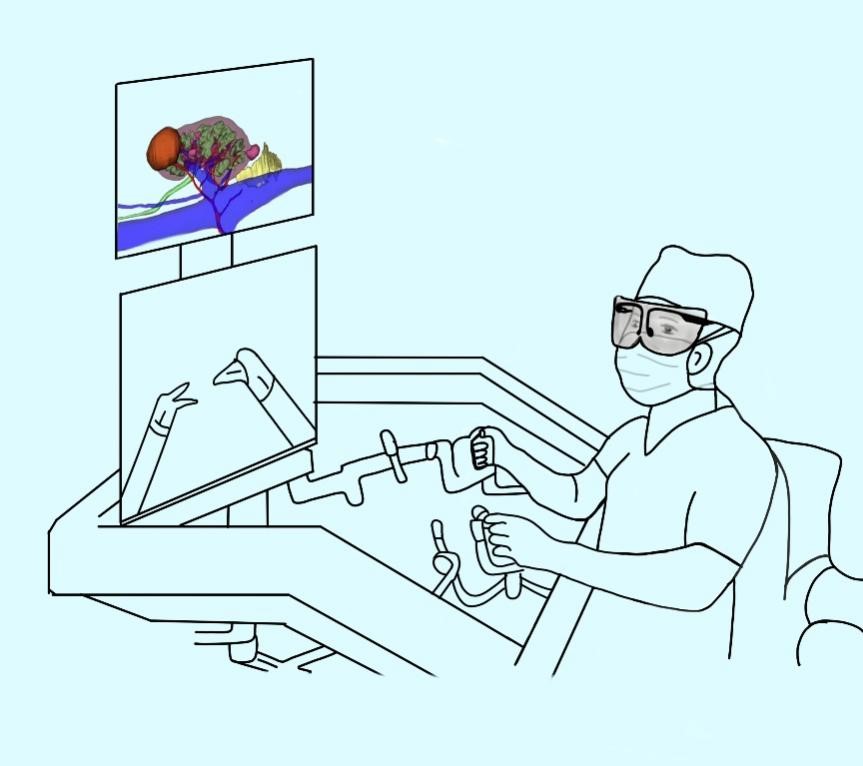
Figure 2 Doctor console (observed with 3D glasses)
The main control part of the doctor’s console is the manual controller, as shown in Figure 3. The manual controller is used to capture the hand or arm movements of the surgeon. For example, the manual controller translates 6cm, and the terminal instrument moves 2cm. This ratio can be adjusted according to the actual operation situation (if any).
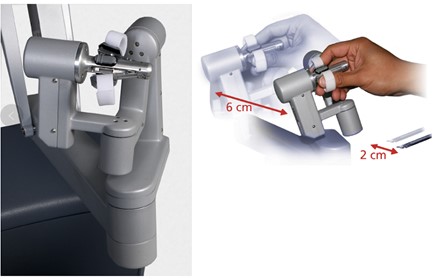
Figure 3 Manual Controller
(2)Patient Surgical Platform
The patient operating platform is located next to the operating bed and includes multiple robotic arms that are split or single, and endoscopes (if any) and surgical instruments can be connected to the robotic arms. Endoscopes are used to provide a 3D view of the patient’s anatomy. The surgical instrument is controlled by the doctor through the doctor’s console to realize the operation. The structure, design, and names of various parts of patient surgical platforms from different manufacturers may be different, but the basic principles and functions are similar.
1. Laser positioning
The patient surgical platform can have laser light indicators to provide positioning information for the user. Before the operation, perform horizontal positioning and surgical positioning first, so that the surgical platform and the robotic arm are in a suitable surgical position.
2. Boom
The boom is an adjustable rotating support structure that moves the robotic arm into a position suitable for performing the procedure.
3. Column
The boom can be moved up or down to adjust the height of the platform.
4. Robotic arm Depending on the product design, the number of robotic arms may vary. The purpose of the robotic arm is to hold and move or manipulate the endoscope (if present) and surgical instruments. The mechanical arm controls the instrument through multiple wheels in the instrument. Each wheel is responsible for controlling different actions of the device, for example, some control the rotation around the axis, and some control the opening and closing.
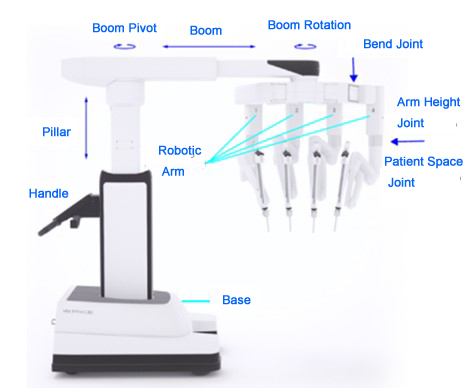
Figure 4 patient operating platform